RETAINING BY DOING: THE ROLE OF ON-POLICY DATA IN MITIGATING FORGETTING
通常认为,SFT使用的FKL(mean-seeking),相比于RL对应的RKL(mode-seeking),更能保留分布信息,从而在llm灾难性遗忘问题上有较好的缓解,但是本文提出,在原本的分布多模态假设下,RL可以在尽可能保留原本旧模态分布的情况下,学习新的模态,从而相比于SFT,在遗忘问题问题上有更好的表现。
同时,作者指出,这一行为主要来自RL的on-policy训练数据,而非其相对SFT多出来的KL正则化项或者优势函数估计。
Revisiting RKL and SKL
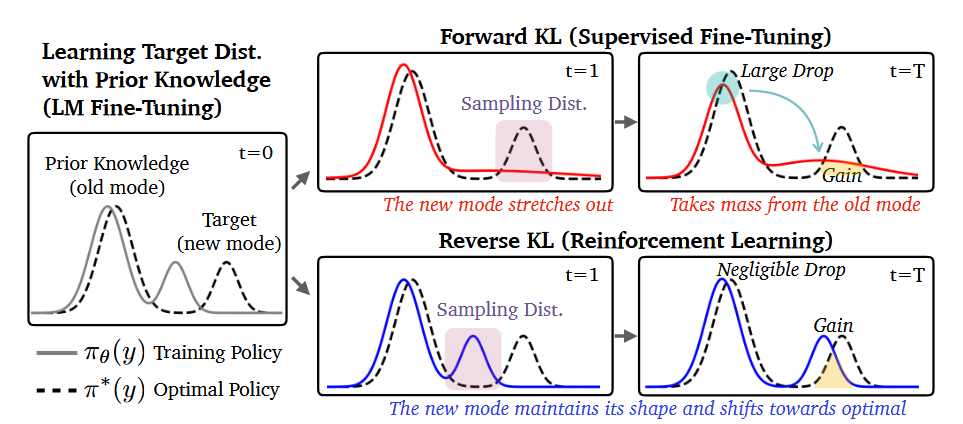
对于第一个结论,作者将最优策略分布\(\pi^*\)建模为两个Gaussion分布的混合: \[ \pi^*(y) = \alpha^* p_{old}(y;\theta_{old}^*) + (1-\alpha^*) p_{new}(y;\theta_{new}^*)\tag{1} \] 其中\(p_{old}\)代表旧知识,\(p_{new}\)代表新知识
当我们将初始策略固定为单模态时: 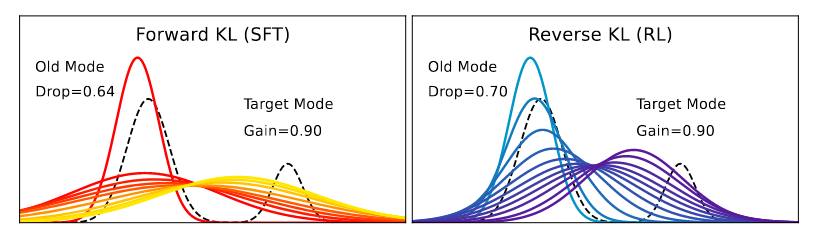 图中红色->黄色,蓝色->紫色代表训练过程的不断推进。可以看到,
FKL尝试覆盖全部模态,对于旧知识会有相当一部分保留,而RKL在mode-seeking行为下会更加激进,从而导致原有知识的大量丢失,这一点可以通过Drop值来体现。
图中红色->黄色,蓝色->紫色代表训练过程的不断推进。可以看到,
FKL尝试覆盖全部模态,对于旧知识会有相当一部分保留,而RKL在mode-seeking行为下会更加激进,从而导致原有知识的大量丢失,这一点可以通过Drop值来体现。
但是在LLM场景下,策略分布往往更可能本身就是多峰的: \[
\pi_{\theta}(y) = \alpha q_{old}(y;\theta_{old}) +
q_{new}(y;\theta_{new})\tag{2}
\] 其中\(q_{old}\)在预训练或者其它任务的微调之后,已经可以较好地覆盖目标分布\(p_{old}\),目标是让\(q_{new}\)去逼近\(p_{new}\),同时尽可能保持\(q_{old}\) 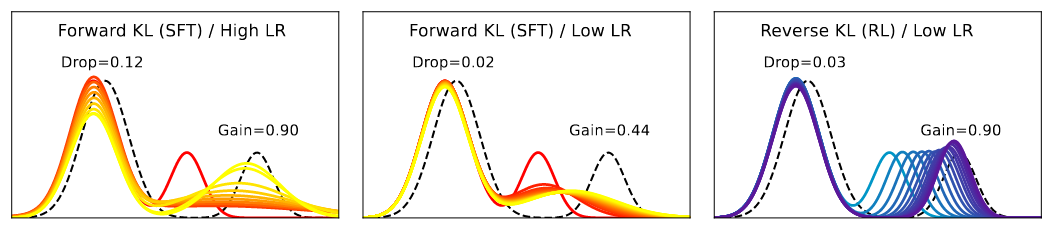
- FKL: 同样尝试让整体分布去匹配目标,但是这会牺牲旧模式的匹配度,在高学习率下,为了更快匹配,对\(q_{old}\)的改变会更大,甚至改变混合系数\(\alpha\)
- RKL: \(q_{new}\)很好地拟合了\(p_{new}\),但是同时\(q_{old}\)也基本没有损失。注意到\[ RKL(p(X),q_{\theta}(X))= E_{x\sim q_{\theta}(X)}\left[ \log \frac{q_{\theta}(x)}{p(x)} \right]\tag{3} \]RKL关注的是q中有概率的地方,p也必须有,从而可以避免在波谷处过度拟合。而原本的\(q_{old}\)已经拟合的不错了,这部分并不会产生多少Loss,从而其可以专心拟合\(p_{new}\)
总之,在对初始分布给出不同的假设之后,可以得到与之前工作截然相反的结论:
RL相比SFT,在新任务上训练之后,可以有更好的防止遗忘旧任务的能力
这个toy实验本身也并非足够完善,分布混合的模式,权重不同,也许会有其它结论,不过其本身给出了反例,可以说明之前的结论并不一定是正确的,尤其是在LLM场景下。
On-policy data training
作者之后探讨了一下RL这种mode-seeking的行为,实际上是来自于on-policy的数据使用。目前RL与SFT的主要区别有:
- RL一般使用on-policy数据,SFT一般使用off-policy数据
- RL的目标函数一般是\[ L_{RL}(\theta;x) = E_{y\sim \pi_{\theta}(\cdot|x)}[r(x,y)] - \beta D_{KL}(\pi_{\theta}(\cdot|x)||\pi'(\cdot|x))\tag{4} \]其相比于SFT,多出来一个KL正则化项
- RL对advantage的运用,导致其对数据梯度进行了一个加权,而在SFT,所有样本梯度的权重是一致的,这一点在REINFORCE with baseline的梯度表达式上可以非常直观的看到:\[ \nabla loss(x) = E_{(a_{t}, s_{t})\sim \pi}[\nabla \log\pi(a_{t}|s_{t}) \ A(t)]\tag{5} \]
在做了一系列对比实验之后,作者指出,on-policy的数据运用,是导致上述mode-seeking行为的主要原因。
Applying on-policy strategy to SFT
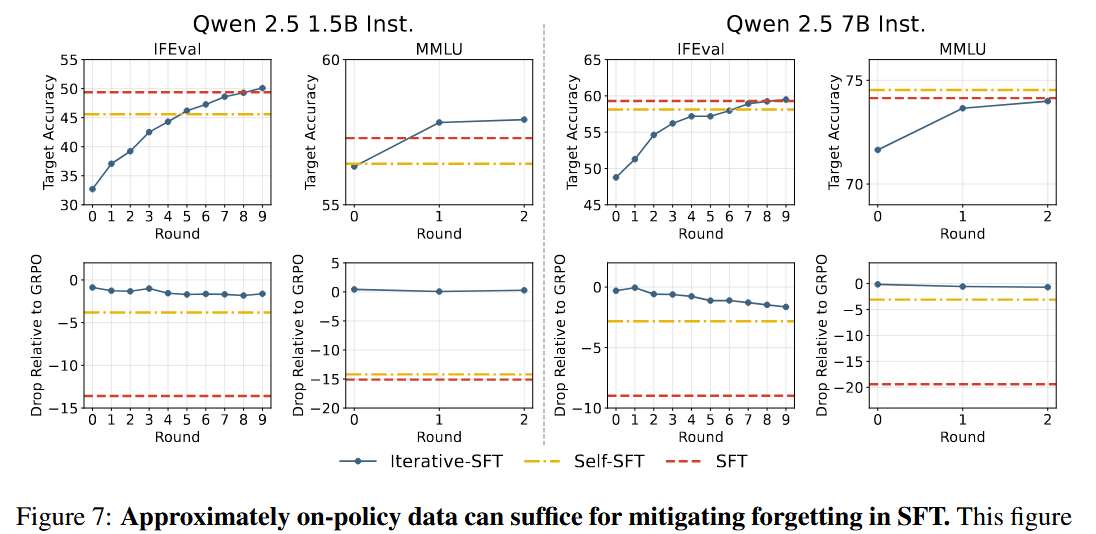
利用这一点,我们显然也可以尝试对SFT进行on-policy的数据运用来尝试缓解灾难性遗忘。这个的成本是高昂的,但是如果做一个权衡:
每隔一段训练时间,用当前模型重新生成数据并进行筛选,在这些新生成的数据上再做SFT
这类似于on-policy,虽然更新频率相比于RL会更低,但是仍然可以享受到缓解灾难性遗忘的好处。
Conclusion
本文指出mode-seeking行为相比于mean-seeking,在LLM场景的分布多模态假设下,在学习新分布的时候,可以更好的保留原分布,从而缓解灾难性遗忘问题。 并且指出这一行为主要来自于on-policy的数据运用。